Pro потолок
Поиск
Потолок динамический
динамический потолок - это... Что такое динамический потолок?
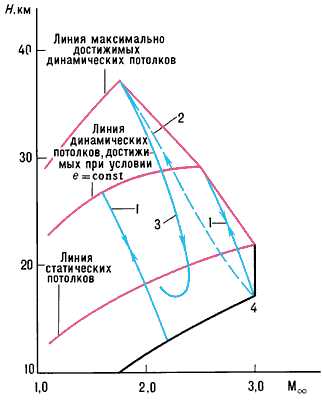
Диаграммы полёта для достижения динамического потолка.
динами́ческий потоло́к 1) Д. п. самолёта — наибольшая высота, достигаемая самолётом в неустановившемся полёте. В области установившихся режимов полёта (ниже линии статических потолков, см. рис.) может быть достигнуто равенство внешних сил, действующих на самолёт. Выше линии статических потолков силы не могут быть уравновешены, поэтому полёт может быть только неустановившимся; переход в эту область возможен лишь путём преобразования части кинетической энергии самолёта в потенциальную. Однако достижение максимальной энергетической высоты, равной максимальной удельной энергии самолёта, неосуществимо. Максимальная удельная энергия e реализуется в горизонтальном установившемся полёте при максимальной тяге двигателей. Для перевода самолёта в режим набора высоты необходимо увеличить угол атаки, что приводит к увеличению аэродинамического сопротивления, в результате чего нарушается баланс сил и производная удельной энергии de/dt = Vnx (V — скорость самолёта, nx, — продольная перегрузка) становится отрицательной. Таким образом, переход в область выше линии статических потолков возможен только из тех точек, в которых производная удельной энергии в горизонтальном полёте положительна, то есть из области, лежащей ниже линии статических потолков. Возможно несколько типов такого перехода. Если при максимальной тяге создать угол атаки, при котором тяга уравновешивает сопротивление, то переход будет совершаться по линии e = const. Параметры траектории (скорость, высота, угол наклона траектории) будут изменяться, причем максимальное значение угла наклона траектории достигается в точке статического потолка. Для обеспечения максимальной высоты в таком движении выход на него из горизонтального полёта нужно производить из точек границ области, допускаемой по скоростному напору или по Маха числу полёта М∞. Самолёт может достичь большей высоты, если закон управления усложнить. Движение также должно начинаться из точек границ области при максимальной тяге двигателей. На первом участке полёта угол атаки необходимо выдерживать таким, чтобы обеспечить движение с максимально допустимой нормальной перегрузкой (если она достигается). По мере увеличения высоты угол атаки увеличивается до значения, максимально допустимого условиями устойчивости полёта, и на остальной части траектории остаётся постоянным. Такой полёт происходит с уменьшением удельной энергии, поэтому после достижения Д. п. при снижении самолёт переходит в горизонтальный установившийся полёт в точке области с меньшим значением удельной энергии. Максимальное значение высоты полёта на этой линии является практически достижимым Д. п., если в этой точке области режимов полёта выполняются требования устойчивости, управляемости и обеспечивается работа силовой установки. Использование неустановившихся режимов полёта наиболее эффективно для скоростных самолётов, кинетическая энергия которых составляет большую часть полной энергии. Расчёты и практические рекордные полёты показывают, что для сверхзвуковых самолётов динамический потолок может превышать статический на 10—15 км.
2) Д. п. вертолёта — наибольшая высота, достигаемая вертолётом в полёте с поступательной скоростью.
Литература:Микоян С. А., Динамический метод набора высоты, в сборнике: Лётчику о практической аэродинамике, М., 1961.
Б. Х. Давидсон.
Энциклопедия «Авиация». - М.: Большая Российская Энциклопедия. Свищёв Г. Г.. 1998.
avia.academic.ru
Сколько у вертолета потолков
Для технической характеристики вертолетов специалисты используют термин «потолок».
Что такое потолок
В авиации потолком называют максимальную высоту, которую конкретный летательный аппарат может набрать при определенных условиях. Потолок измеряют и указывают для стандартных погодных условий, которые рассчитываются по параметрам международной стандартной атмосферы.
Международная стандартная атмосфера (МСА) — расчетная модель изменения температуры и плотности воздуха, а также атмосферного давления и кинематической вязкости воздуха с изменением высоты над уровнем моря.Реальные погодные условия могут отличаться от шкалы МСА. Это приводит к изменению заявленного потолка летательного аппарата. Причину такой ситуации легко понять на примере вертолета.
Способность винтокрылой машины набирать высоту определяется производительностью двигателя и тягой основного винта. Плотность воздуха прямо влияет как на работу силовой установки, так и на эффективность несущего винта. Уменьшение этого показателя снижает реальную мощность двигателя и тягу.
В свою очередь, температура и атмосферное давление влияют на плотность воздуха. Поэтому изменение даже одного из показателей меняет заявленный потолок летательного аппарата.
Какие бывают потолки
Для характеристики возможностей гражданских вертолетов используют теоретический и практический потолок.
Теоретический, или статический, потолок
Это максимальная высота, которую винтокрылая машина может достичь при вертикальном взлете. Данный показатель также называют потолком висения. После достижения теоретического потолка вертолету не хватает мощности двигателя и тяги винта для набора высоты.
Статический потолок характеризует технические возможности вертолета, но на практике не используется. Теоретическая максимальная высота для вертолета Ми-8 равна 3980 м. Это не значит, что пилоты поднимаются почти на 4 км при вертикальном взлете. Для достижения статического потолка двигатель должен работать на пределе возможностей, а лопасти винта ‒ иметь максимальный угол атаки для создания подъемной силы. В такой ситуации существует риск срыва потока и развития внештатной ситуации.

Теоретический потолок вертолета Bell 407 составляет 3720 м, но в обычных условиях пилоты не набирают такую высоту вертикально
Практический, или динамический, потолок
Это максимальная высота, которую вертолет может набрать во время движения в двух плоскостях: вертикальной и горизонтальной. Этот показатель также называют сервисным потолком. Практический потолок считается показателем высоты, на которой конкретное воздушное судно может летать.
На практике гражданские вертолеты в режиме визуального полета редко достигают практического потолка. Показатель для Airbus h275 составляет 6000 м. На этой высоте летает большая авиация: пассажирские и транспортные лайнеры, военные борты. Вертолеты малой авиации летают на высоте нескольких сотен метров.

Практический потолок Airbus h275 составляет 6 км, но на практике на такой высоте летает только большая авиация
Максимальная высота полетов для вертолетов
Француз Жан Буле установил абсолютный рекорд высоты полета на вертолете Aérospatiale SA.315B Lama в 1972 году. Он поднялся на 12 442 метра. Отважному пилоту пришлось сажать винтокрылую машину в режиме авторотации, так как из-за большой нагрузки двигатель отказал.

Благодаря смелости пилота Жана Буле вертолет Aérospatiale SA.315B Lama преодолел все потолки, поднявшись на высоту 12,4 км
Есть еще один известный рекорд практического использования вертолета на большой высоте. Французский пилот Дидье Дельсаль посадил вертолет Airbus Helicopters h225 на Эверест на высоте 8850 м.
Обратите внимание на важные детали: практический потолок Aérospatiale SA.315B Lama составляет 5400 метров. Для Airbus h225 этот показатель равен 4600 метров. То есть пилоты Буле и Дельсаль сумели поднять винтокрылые машины гораздо выше заявленных производителем потолков.Отечественные пилоты также решают практические задачи на экстремальных высотах.
В 2007 году спасатели с риском для жизни на вертолете Ми-8 сняли со скалы на высоте около 5000 м двух альпинистов на Безенгийской стене.
В 80-е годы XX века Ми-8 применялся для доставки грузов на Памирское плато на высоту 6100 м. Воздушные суда не садились, а сбрасывали груз.
В 70-е годы пилоты вертолета Ми-4 эвакуировали тяжелобольного пациента с Памира с высоты 6000 м. Чтобы взлететь, вертолету пришлось совершить разбег по самодельной взлетно-посадочной полосе. Также с борта демонтировали часть оборудования, чтобы уменьшить массу.

Экипаж Ми-4 эвакуировал пациента с Памира
Как высоко летают самые популярные коммерческие вертолеты? Вот информация по некоторым типам воздушных судов:
| Вертолет | Динамический потолок, м | Статический потолок, м |
| Robinson R22 | 4200 | 1000 |
| Robinson R44 | 4250 | 1500 |
| Robinson R66 | 4270 | 3048 |
| Bell 407GX | 6100 | 3720 |
| Airbus Helicopters h255 (Eurocopter EC155) | 4572 | 1185 |
| AgustaWestland AW139 | 6069 | 2478 |
Несмотря на то, что статический и динамический потолок винтокрылых машин обычно составляет 4‒6 км, на практике они летают на высоте нескольких сотен метров. Это связано с правилами и особенностями полетов воздушных судов малой авиации.
helico-russia.ru
Большая Энциклопедия Нефти и Газа
Cтраница 1
Динамический потолок определяют также как высоту, на которой скорость набора высоты обращается в нуль. Основные факторы, ограничивающие потолок, - это падение мощности двигателя с высотой, увеличение потребной мощности с высотой и полетным весом, а также изменение потребной мощности в зависимости от скорости полета. [1]
Для выхода на динамический потолок необходимо начинать маневр с такого режима, при котором величина Нэ максимальна. [3]
Рассмотрим методику выполнения полета на динамический потолок. [4]
Существуют еще понятия боевой потолок, динамический потолок. Они поясняются в следующей главе. [5]
Для сверхзвуковых самолетов, кроме практического и теоретического потолков, вводятся понятия статического и динамического потолка. [7]
Современные самолеты могут летать и вести воздушный бой на высоте 20 км и больше. Маневрирование и ведение боя на таких высотах, особенно при полетах на динамический потолок, требует повышенного внимания летчика, так как возможно непроизвольное сваливание самолета в штопор. Для правильного пилотирования самолета в случае сваливания в штопор на больших высотах летчику нужно знать, как изменяются характеристики штопора с изменением высоты полета. [8]
Установившийся полет на динамических высотах невозможен: он возможен только на статическом потолке и ниже. Но в течение некоторого времени, постепенно теряя скорость, на динамической высоте можно лететь как по прямой, так и с разворотом. Чем ближе к динамическому потолку, тем это время меньше, а для динамического потолка оно равно нулю. [9]
Из приведенных рассуждений следует, что если фактическая перегрузка п меньше псв, то хотя скорость полета V и будет меньше скорости VCB горизонтального полета, самолет не выйдет на угол акр и сваливания не произойдет. Это обстоятельство используется, в частности, на современных самолетах для достижения так называемого динамического потолка и для рекордных полетов на высоту. После этого, отклоняя ручку на себя, летчик создает перегрузку п 1 и переводит самолет в набор высоты. Скорость полета при этом начинает уменьшаться. [10]
Если высота больше статического потолка, то скорость, соответствующая максимальному углу набора высоты, находится в диапазоне между минимальной скоростью и скоростью, при которой мощность минимальна. С увеличением полетного веса минимальная потребная мощность возрастает, а значит, максимальная скорость набора высоты уменьшается. Уменьшается она и с высотой. Точка, в которой максимальная скорость набора высоты равна нулю, определяет абсолютную максимальную высоту полета - динамический потолок. [11]
Для вертолетов особый интерес представляют три максимальные высоты. Максимальная высота висения вне влияния земли ( статический потолок) определяется как высота, на которой вся располагаемая мощность равна мощности, потребной для висения при заданном полетном весе. Другим таким параметром является максимальная высота висения на воздушной подушке. Поскольку вблизи земли потребная индуктивная мощность уменьшается, максимальная высота висения на воздушной подушке значительно превышает статический потолок. Увеличение максимальной высоты или полетного веса в случае висения на воздушной подушке дает некоторые преимущества при эксплуатации вертолета. Кроме того, интерес представляет максимальная высота, достигаемая при полете вперед со скоростью, соответствующей минимальной мощности. Эти высоты получают, определяя скорости набора высоты при максимальной мощности. Экстраполяция расчетных или полученных в летных испытаниях кривых до нулевой скорости набора высоты позволяет найти динамический потолок. [12]
Страницы: 1
www.ngpedia.ru
Энергетическая высота. Статический и динамический потолок самолета.
Полная механическая энергия самолета определяется как сумма кинетической и потенциальной энергии: .
Разделив Е на силу тяжести G=mg, получим удельную (т.е. приходящуюся на единицу веса) энергию самолета. Этот параметр называется энергетической высотой (так как имеет размерность длинны): .
Физический смысл - это высота, на которую мог бы подняться самолет при постоянной полной энергии и падении скорости полета до нуля.
Динамический потолок самолета.
Достижение высот больше теоретического статического потолка может осуществляться только динамически, т.е. только путем расходования запаса кинетической энергии самолета (при уменьшении скорости полета).
Динамический потолок самолета - это наибольшая высота, которой может достичь самолет за счет использования запаса кинетической энергии при уменьшении скорости полета до эволютивной , на которой ещё сохраняется управляемость ЛА.
Начинается набор динамического потолка с высоты и скорости, при которых полная энергия самолета максимальна:
В первом приближении динамический потолок определяется при следующем допущении: полная энергия самолета в процессе достижения не изменяется.
Для более точного определения динамического потолка необходимо учитывать потери энергии ЛА при наборе высоты и использовать вариационный метод.
Рекорд динамического потолка для самолета с ТРД равняется 37650 м. Он установлен в 1977году советским самолетом Е-266М (модернизированным МиГ-25) и до сих пор не побит.
20. Планиpование самолета. Оптимальные pежимы. Поляpная диагpамма скоpостей планиpования.
Планирование – снижение с нулевым или близко к нулю тягой.
Расчет снижения – это определение основных параметров движения самолета при снижении: . Он производится по методике, аналогичной расчету набора высоты, однако имеет свои особенности, так как
Уравнение установившегося планирования самолета при Р=0. Система уравнений:
Оптимальные режимы планирование самолета – это режимы, обеспечивающие при заданной начальной высоте Н, 1) максимальную дальность планирования 2) максимальное время планирования
Максимальная дальность планирования ,
Максимальное время планирования
При Р=0
Поляpная диагpамма скоpостей планиpования.
Зависимость между воздушной скоростью V, вертикальной скоростью снижения и углом наклона траектории при снижении самолета может быть изображена графически.
Полярная диаграмма строится для ряда значений высоты Н при G=const по уравнения установившегося планирования
Алгоритм построения следующий.
1. Задаем ряд значений от малого значения ( 0,1) до .
2. Для каждого по поляре находим .
3. Для соответствующих вычисляем качество
4. Вычисляем тангенс угла наклона траектории:
5. Находим угол наклона траектории .
6. Вычисляем скорость полета: .
7. Вычисляем вертикальную скорость: .
По полярной диаграмме можно сделать ряд выводов.
· Минимальный угол наклона траектории при планировании не зависит от высоты полета (поскольку не зависит от нее максимальное качество) и соответствует касательной, проведенной к поляре скоростей планирования из начала координат.
· Минимальная вертикальная скорость планирования определяется как точка касания поляры касательной, проведенной параллельно оси абсцисс. С ростом высоты увеличивается, что связанно с уменьшением плотности воздуха.
· Для каждой высоты существуют первый и второй режимы планирования. На первом режиме большим углам атаки соответствуют более пологие траектории, на втором режиме – наоборот. Граница между режимами соответствует точке , т.е. режиму
Дальность полёта. Основные понятия. Система уравнений для расчёта дп.
Дальность полета.
Дальность полета: расстояние по горизонтали, которое пролетит самолет от взлета, до посадки. (Длина проекции траектории на землю)
Продолжительность полета: время нахождения самолета в воздухе. Дальность и продолжительность полета зависят от многих факторов. Различают техническую; тактическую дальность итд.
Располагаемый запас топлива: топливо, которое тратится на набор высоты крейсерский полет и снижение.
Дальность считают с учетом всего располагаемого топлива – на прогрев – на рулежку, отнимается при этом техническая дальность. АНЗ- аэроновигационный запас топлива(с учетом захода на второй круг или на соседний аэродром). Дальность полета с учетом АНЗ- параметрическая дальность.
Радиус действия- наибольшее расстояние, на которое может удалиться самолет с последующим возвращением на аэродром.
Полная дальность: складывается из дальности набора, горизонтального полета и снижения.
infopedia.su